












新型3D打印连续体软机器人可以起重3磅
通常,当我们在日常生活中想到机器人时,它是一种拟人化的东西,可能是C-3PO和来自The Jetsons的机器人女仆Rosie之间的杂交。

连续体节段,每对椎骨之间有一个柔软的“铰链”,可提高扭转刚度(图片来源:利兹大学)
但机器人并不总是代表人类的形式,有些类型的机器人从未在流行文化中被描绘过。以连续体机器人为例,他们在航空航天工业、机器人手术和炸弹处理领域找到了工作。这些细长机器也称为蛇形机器人,这些纤细的机器可以弯曲成光滑的曲线。
这些章鱼式手臂通常通过电缆来移动的,这些电缆从肢体的底部产生力,然后将力传递到整个臂的不同连接点。这为机器人提供了移动和扭转所需的移动性和扭矩。所有这些都是由电动执行器驱动的,它也提供了高度的控制。
这些蛇形机器人面临的一个挑战是某些设计(如执行器位于弯曲部分的设计)以牺牲强度和速度为代价提供灵活性和扭转。这种缺乏刚性是开发更坚固和更强大的机器人提升臂的主要限制之一。
使用精密工程解决这个问题的成本很高,利兹大学的一组研究人员希望通过3D打印来减轻这种影响。
利兹团队的设计
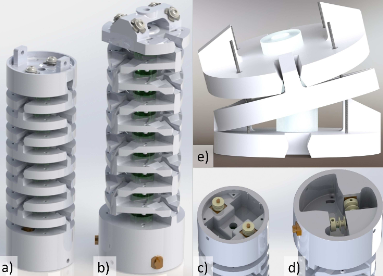
测试节段设计的电机、线轴和联锁椎骨装置。(图片来源:利兹大学)
在最近的一项研究中,研究人员的目标是创建一个具有广泛实用性的3D打印连续体机器人片段。为了提供更强的抗扭刚度,他们选择沿着连续的柔性骨架(如标准的蛇形机器人)使用等间距的“椎骨”段。这些节段有助于引导移动臂的四个肌腱,但也可以彼此互锁以产生刚性。
借助3D打印,可以快速打印不同版本设计的迭代。用STratasys Objet1000多材料打印机预先组装打印每个椎骨段的段。 Tango +材料包括柔软、柔韧的骨架和更加坚硬的Vero材料,这些材料构成了椎骨本身。实际上,设计有一个集中的孔,提供吸力。
强度试验

分段测试安装,增加的重量被添加到端部。(图片来源:利兹大学)
该团队确定了两个测试起重能力的设计方案。
为了测试臂的各个部分,每个部分都水平安装在所述钻机上。测试从两个不同的起始位置开始:一个完全垂直,激活一个臂的电机;另一个垂直旋转45度,激活两个电机。该测试从该段的最低运动极限开始,重量尽可能垂直提升。
在最好的情况下,该团队的V 1.2设计使两个电机都能够承载1300g(1.3kg / 2.86lbs)的最大有效载荷。对于此配置,最大有效负载下的平均速度为每秒10度。联锁椎骨设计的性能也令人鼓舞,因为它可以预测在负载下的表现。

四种不同节段结构的扭升试验结果
虽然与传统制造的工业机器人相比,1.3千克看起来可能微不足道,但这可能是用技术上优越的3D打印机器人取代传统机器人的第一步。为了达到这一点,利兹团队正在寻找将这些单独的部分连接成一个更强大的工作臂。